Thank you for your request for your special offer!
We will process it as soon as possible and send you your personal offer for your desired article!
Request a personal not binding offer!
Simply fill in the missing details and submit the form. We will process your request for your personal offer as soon as possible and send you our offer by e-mail!
Please note that your existing shopping cart will be emptied when you request your personal offer.
Owner & contact person
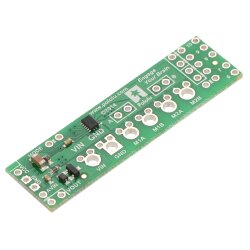
Pololu DRV8835 Dual Motortreiber Shield for Arduino
By selecting "Accept all", you give us permission to use the following services on our website: YouTube, Vimeo, ReCaptcha, Google Map, "OSS Lieferland" Geo-Ip Service, Google Kundenrezensionen, Google Analytics 4, Google Ads Conversion Tracking. You can change the settings at any time (fingerprint icon in the bottom left corner). For further details, please see Individual configuration and our Privacy notice.
Data privacy settings
The settings you specify here are stored in the "local storage" of your device. The settings will be remembered for the next time you visit our online shop. You can change these settings at any time (fingerprint icon in the bottom left corner).
For more information on cookie lifetime and required essential cookies, please see the Privacy notice.
To view YouTube contents on this website,
you need to consent to the transfer of data and storage of third-party cookies by
YouTube (Google).
This allows us to improve your user experience and to make our
website better and more interesting.
Without your consent, no data will be transferred to YouTube.
However, you will also not be able to use the YouTube services on this website.
To view Vimeo contents on this website, you need to consent to the
transfer of data and storage of third-party cookies by Vimeo..
This allows us to improve your user
experience and to make our website better and more interesting.
Without your consent, no data will
be transferred to Vimeo. However, you will also not be able to use the Vimdeo services on this website.
To submit forms on this page, you need to consent to the transfer of data and storage of third-party cookies by Google.
With your consent, reCAPTCHA, a Google service to avoid spam messages via contact forms, will be embedded.
This service allows us to provide our customers with a safe way to contact us via online forms. At the same time, the service prevents spam bots from compromising our services.
After you gave your permission, you might be asked to answer a security prompt to send the form.
If you do not consent, unfortunately you cannot use the form. Please contact us in a different way.
The Geo-Ip service is used only to determine the country from which the user is visiting this site in order to automatically display country-specific tax rates and prices.
Description:
Country determination for country-specific tax rates]]
Wir arbeiten mit Google im Rahmen des Programms „Google Kundenrezensionen“ zusammen. Dieses Programm gibt uns die Möglichkeit, Kundenrezensionen von Nutzern unserer Website einzuholen. Hierbei werden Sie nach einem Einkauf auf unserer Website gefragt, ob Sie an einer E-Mail-Umfrage von Google teilnehmen möchten. Wenn Sie Ihre Einwilligung gemäß Art. 6 Abs. 1 lit. a DSGVO erteilen, übermitteln wir Ihre E-Mail-Adresse an Google. Sie erhalten eine E-Mail von Google Kundenrezensionen, in der Sie gebeten werden, die Kauferfahrung auf unserer Website zu bewerten. Die von Ihnen abgegebene Bewertung wird anschließend mit unseren anderen Bewertungen zusammengefasst und in unserem Logo Google Kundenrezensionen sowie in unserem Merchant Center-Dashboard angezeigt. Außerdem wird Ihre Bewertung für Google Verkäuferbewertungen genutzt. Im Rahmen der Nutzung von Google Kundenrezensionen kann es auch zu einer Übermittlung von personenbezogenen Daten an die Server der Google LLC. in den USA kommen.
Sie können Ihre Einwilligung jederzeit durch eine Nachricht an den für die Datenverarbeitung Verantwortlichen oder gegenüber Google widerrufen.
Für den Fall der Übermittlung von personenbezogenen Daten an die Google LLC. mit Sitz in den USA, hat sich Google LLC. für das us-europäische Datenschutzübereinkommen „Privacy Shield“ zertifiziert, welches die Einhaltung des in der EU geltenden Datenschutzniveaus gewährleistet. Ein aktuelles Zertifikat kann hier eingesehen werden: https://www.privacyshield.gov/list
Im Rahmen der Nutzung werden ebenfalls "Google Fonts" eingebunden: Google Fonts ist ein Dienst, der es Websites ermöglicht, bestimmte Schriftarten für ihre Gestaltung zu verwenden. Dabei wird Ihre IP-Adresse Google bekannt gegeben.
Datenübertragung außerhalb der EU: Dieser Anbieter kann Ihre personenbezogenen Daten außerhalb des EWR/der EU übertragen, speichern oder verarbeiten. Diese Länder haben möglicherweise nicht das gleiche Datenschutzniveau und die Durchsetzung Ihrer Rechte kann eingeschränkt oder nicht möglich sein.
Processing company:
Google Ireland Limited, Gordon House, 4 Barrow St, Dublin, D04 E5W5, Irland
Erhobene Daten: anonymisierte IP Adresse, Datum und Uhrzeit des Besuchs, Nutzungsdaten, Klickpfad, App-Aktualisierungen, Browser Informationen, Geräte-Informationen, JavaScript-Support, Besuchte Seiten, Referrer URL, Standort-Informationen, Kaufaktivität, Widget-Interaktionen
Description:
Analyse
Processing company:
Google Ireland Ltd, Gordon House, Barrow Street, Dublin 4,IE
Mit dem Google Ads Conversion Tracking können wir unseren Werbeerfolg im Google Werbenetzwerk messen. Wir schalten Werbung im Google Werbenetzwerk, damit unsere Angebote besser gefunden werden. Wir versuchen dabei Werbung so optimal wie möglich zu gestalten. Auch um Werbekosten so gering wie möglich zu halten. Dies spiegelt sich in unseren Preisen wieder ;)
Erhobene Daten: zufallsgenerierte USER-ID
Description:
Marketing
Processing company:
Google Ireland Ltd, Gordon House, Barrow Street, Dublin 4,IE
Would you like to see these contents? Activate the desired contents for one session only or allow the website to remember these settings. Once you have given your consent, the third-party data can be loaded. For this, third-party cookies might be stored on your device. You can change these settings at any time (fingerprint icon in the bottom left corner). For further details, please see the Privacy notice.